Industrial robot ES5





ES5 ROBOT
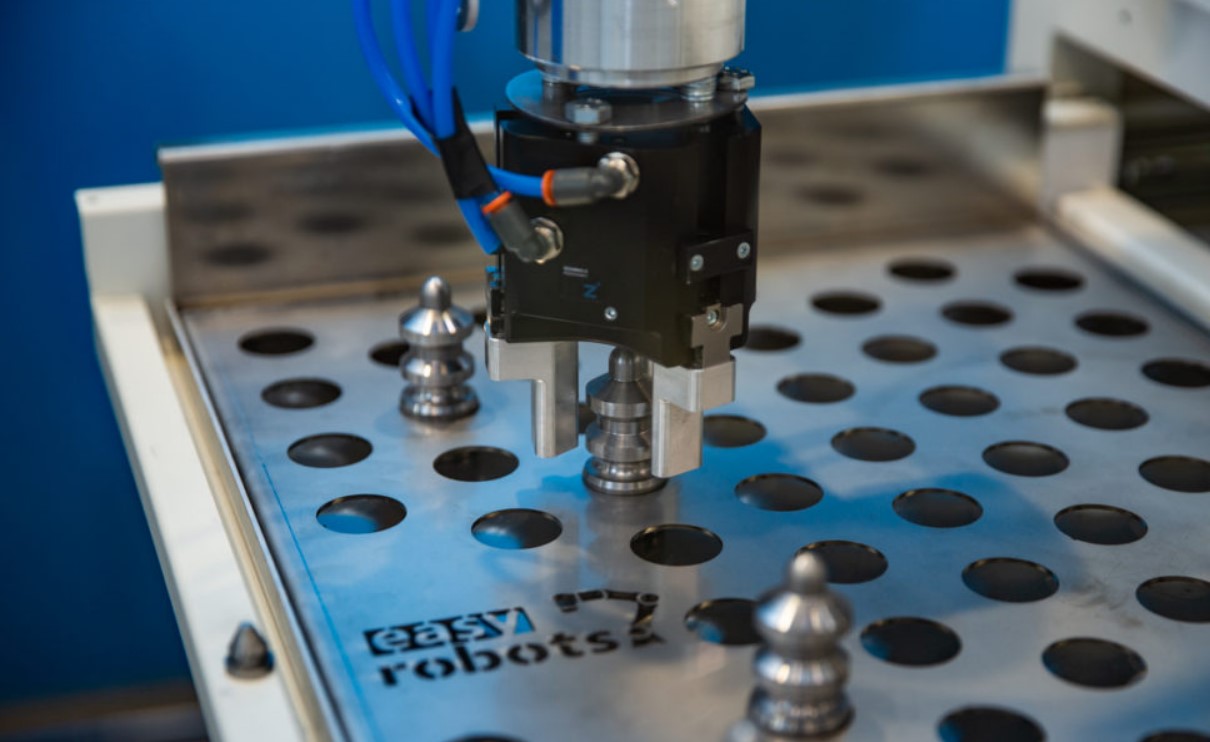
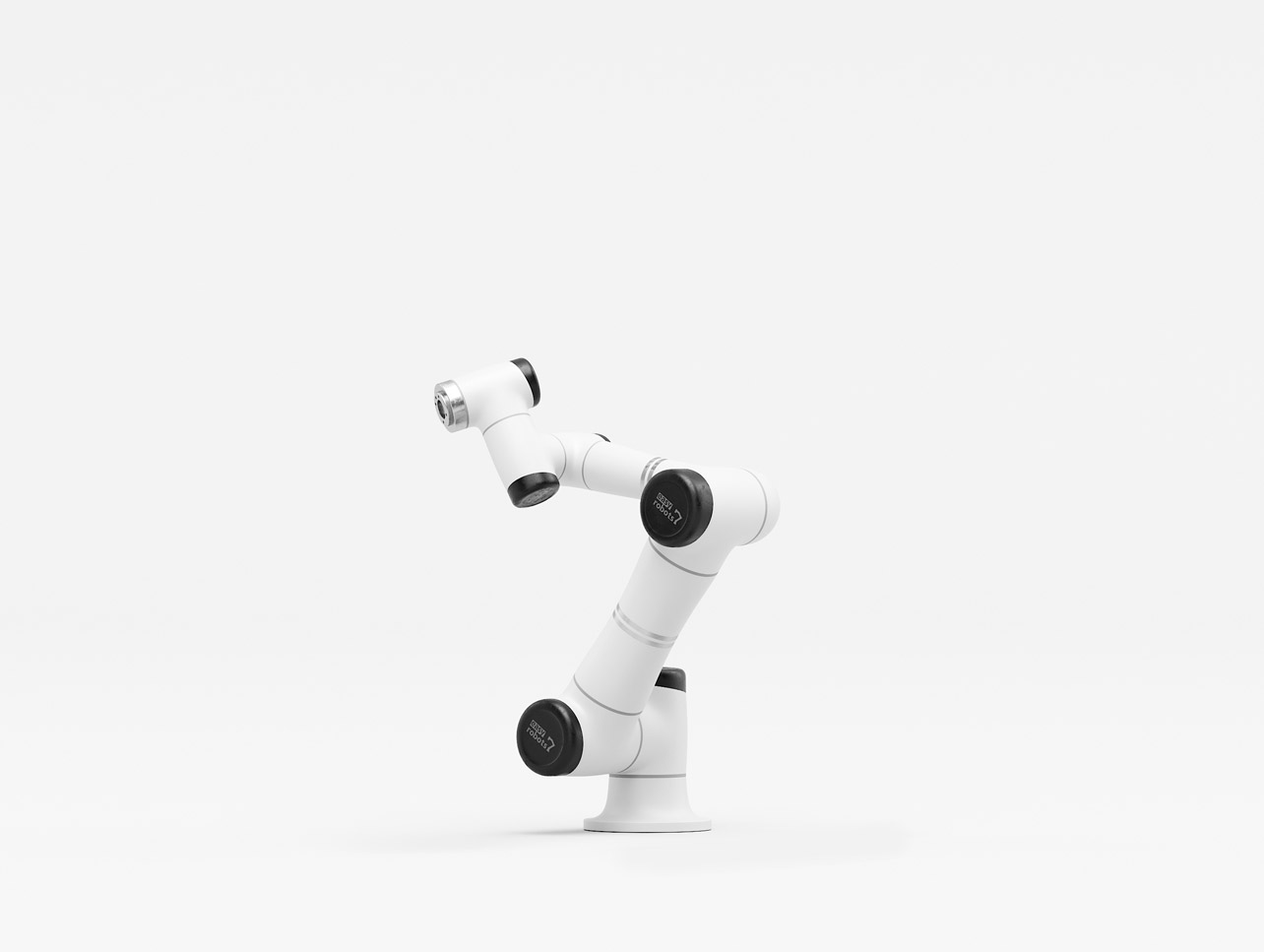
ES5 is the smallest industrial robot offered by our company. This 6-axis manipulator, weighing 27 kg, can maneuver a payload of up to 5 kg. It is ideal for various types of production where precision and reliability are required. It is designed to optimize repeatable, high-precision processes that handle both small and large batches. The industrial robot , with its compact structure and intuitive control panel, allows for quick configuration changes and adaptation to another production cell.
| Mechanical parameters |
ES5 |
| Lifting capacity | 5kg |
| Maximum range | 921 mm |
| Repeatability | ±0.1mm |
| Degrees of freedom | 6 |
| Base size | ⌀200 mm |
| Weight | 27kg |
| IP protection class | IP 40 |
| Motion | Range | Speed |
|---|---|---|
| J1 (basis) | ±180° | 160°/sec |
| J2 (arm) | ±150° | 160°/sec |
| J3 (elbow) | ±160° | 160°/sec |
| J4 (wrist 1) | ±180° | 180°/sec |
| J4 (wrist 2) | ±180° | 180°/sec |
| J4 (wrist 3) | ±360° | 180°/sec |
| Maximum linear speed | 2 m/s | 2 m/s |
| Working conditions | |
|---|---|
| Temperature range | 7 - 40 °C |
| Humidity (max.) | 80% |
| Noise level (max.) | 86 dB |
| Mounting position | any |


| Control cabinet | |
|---|---|
| IP protection class | IP 65 |
| Number of digital inputs/outputs | 16/12 |
| Number of analog inputs/outputs | 1/0 |
| Possibilities of extension | analog and encoder inputs, RS232/422/485 communication interfaces, IO-Link Master, Modbus TCP, EtherCAT, EthernetIP |
| Power source | 230V/50Hz |
| USB ports | 1 |
| Dimensions | 500x500x210mm |
| Length of the wardrobe-arm cable | 5 m |
| Weight | 15kg |
| Average energy consumption | 500W |
| Operator panel | |
|---|---|
| Software | EScontrol |
| IP protection class | IP 44 |
| Type of display | touch 10.1" |
| Resolution | 1280x800 |
| The length of the cabinet-panel cable | 5 m |
| Weight | 1.5kg |
| Compliance with standards |
|---|
| Machinery Directive 2006/42/EC |
| Electromagnetic Compatibility Directive 2014/30/EU |
| Low Voltage Directive 2014/35/EU |
| PN-EN ISO 10218-1 "Safety requirements for industrial robots" |

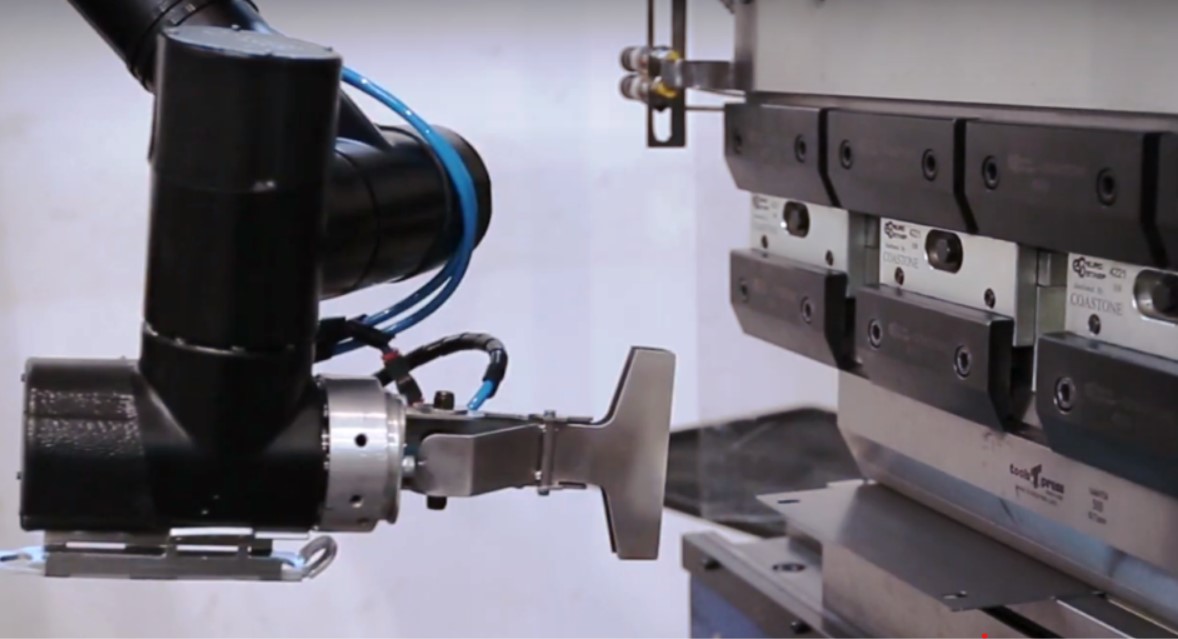
Realizations